Search Results
RL - train a RL based dual-arm motion controller in simulator
RL - implement a RL based dual-arm motion controller on real robot
Solving Geduld-Spiele Cube with Dual Arm Robot via RL and Sim-to-Real (1): Flat Cube
#5 RL Simulation to Real Life
Deep Model-Based RL for Real-World Robotic Control
Model-free RL for Robust Locomotion Using Trajectory Optimization for Exploration
Reaching the Limit in Autonomous Racing: Optimal Control versus Reinforcement Learning (SciRob 23)
pybullet for custom python RL environments
Design Choices for Dual-arm Robotic Manipulator Control - MIT 6.4212 (Fall 2022)
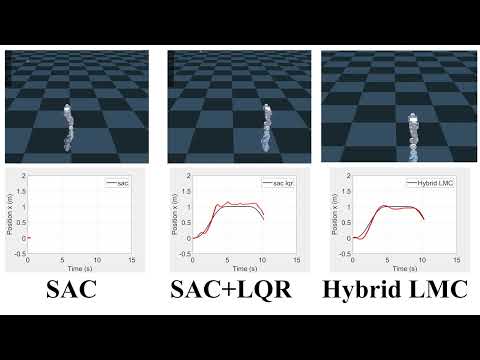
Hybrid LMC: Hybrid Learning and Model-based Control for Wheeled Humanoids via Ensemble Deep RL
Competitive Multi-Agent RL Simulation Using ROS2 and Gazebo
Making Real-World Reinforcement Learning Practical